3号機は歩くんだぜ
2号機がそこそこ動くようになったので、ひっそりと3号機作り始めたわ。
とりあえず、目処が立ったので記しておく。
カメラ積みたいとか、センサーつけてライントレースしたいとか2号機に対する願望は尽きることないのよ。
とりあえず動いたってことと、その先は手詰まり感があって、なかなか気合が入らなかったんだけど、ちょっと別の所でスイッチが入ったので、3号機を作ることにしたわ。
伝説に触れる
こどもの頃に「アクリルロボットの工作」っていう本があって、こどもながらにスゲーと思ったんだけど、その当時は結局作らずに本だけ眺めて終わってたんだよね。
だいぶ後になってから、タミヤからキット化されたものが発売されたけど、なんかコレジャナイ感がいっぱいで、スルーしてたのね。
ところが、去年のMakeの時に新しい本が出て、
著者の三井さんも会場に来ててサインもらったりした訳よ。
あぁ、これ3度目のなんとかってやつかも。
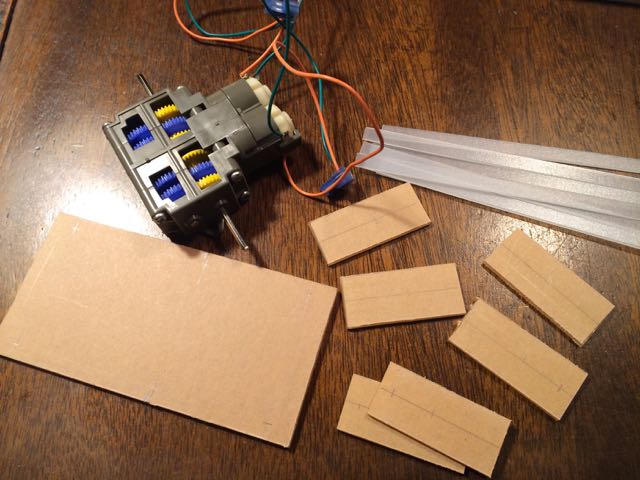
そんな訳で、思い立ったが吉日、作り始めたよ。


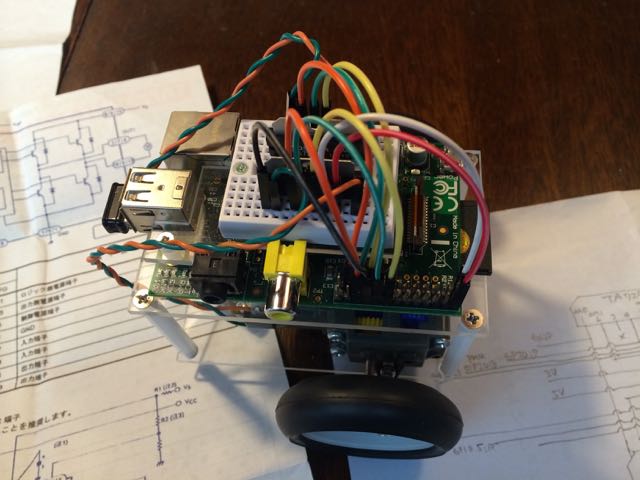
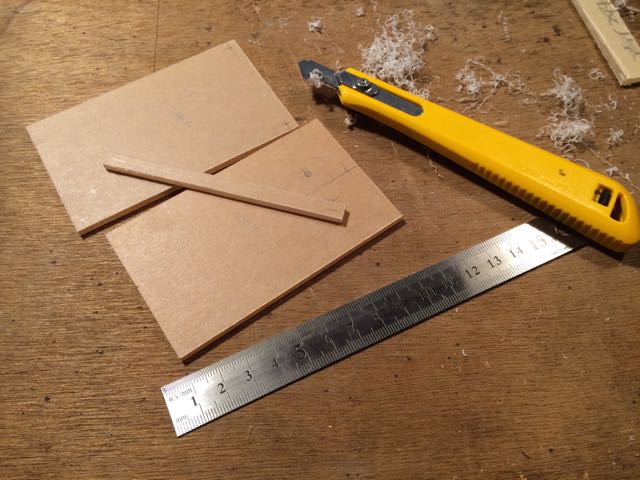
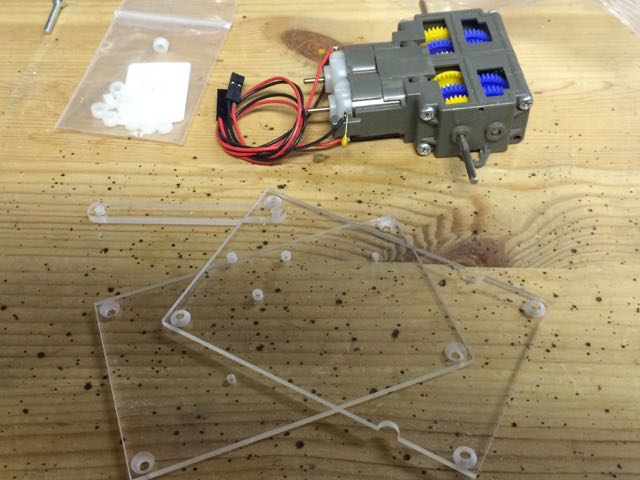
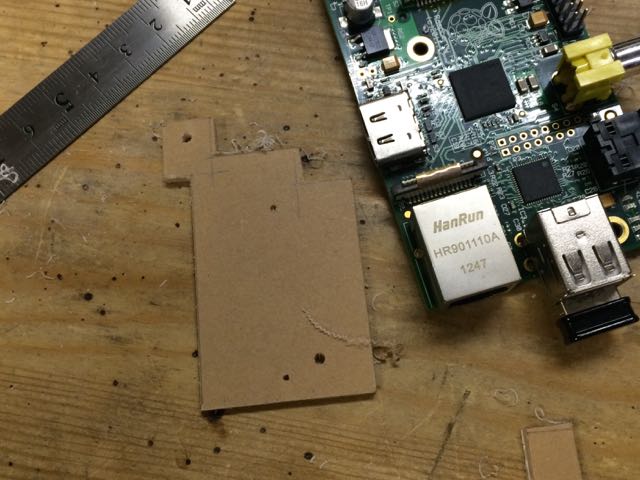
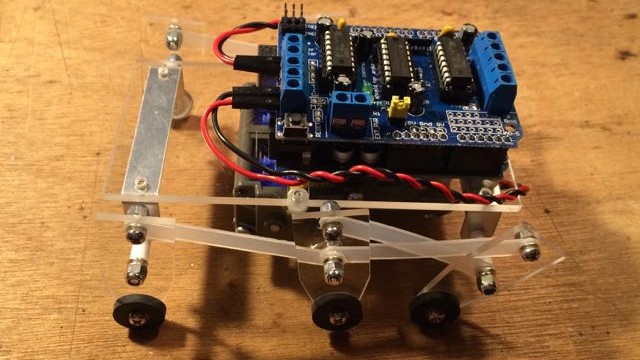
新しい本に実寸の図面が乗ってるんだけど、ギヤボックスとか手持ちのでやろうとしたら、やっぱりそのままじゃ乗らないので、その辺は調整してるんだけど、そうすると、脚の長さとかリンクの長さとかどうしたらいいか分からないのよ。
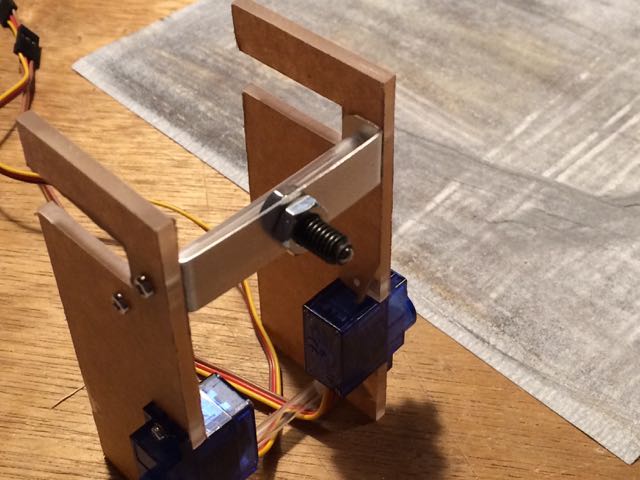
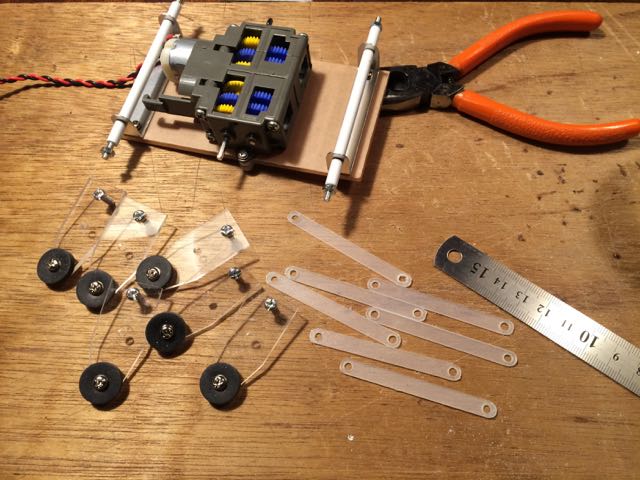
で、いろいろ考えた挙句、3本の脚が平行になった時に長さを合わせてばいんじゃないかって思って、真ん中の脚のクランク分オフセットして寸法とったのね。
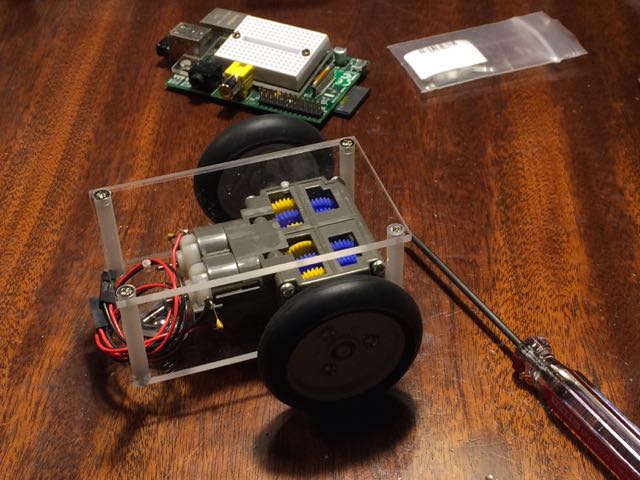
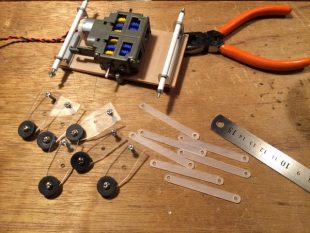
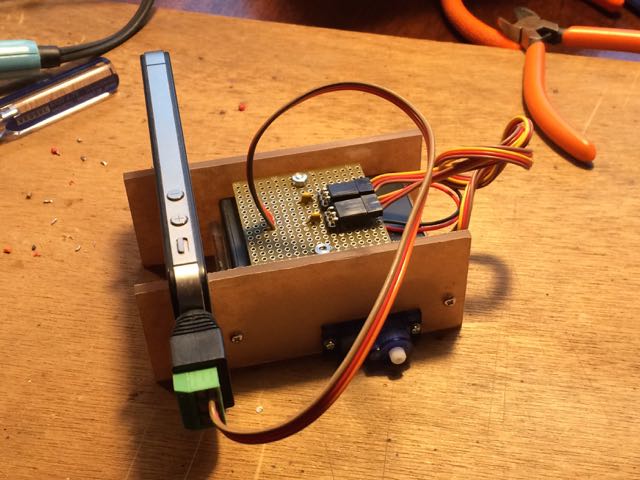
こういうのっていうのは、きちんとした出し方があるんだろうけど、分かんないし、とりあえずやってみるってことで組み上げたけど、どうも全部の脚が平行になるタイミングはないみたい。
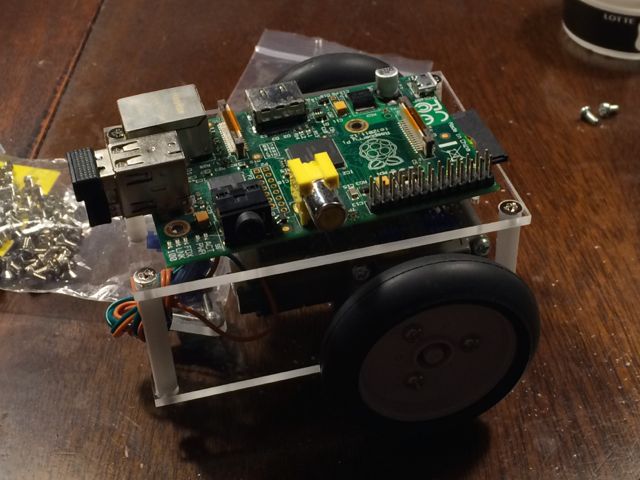
この状態でも動いたけど、この画のだと真ん中の脚の動き方が左側にだけ近くて、本の図面だとリンクの長さは全部同じになってるんだわ。左足の軸から出てるリンクを短くしないといけないんだな、コレ。
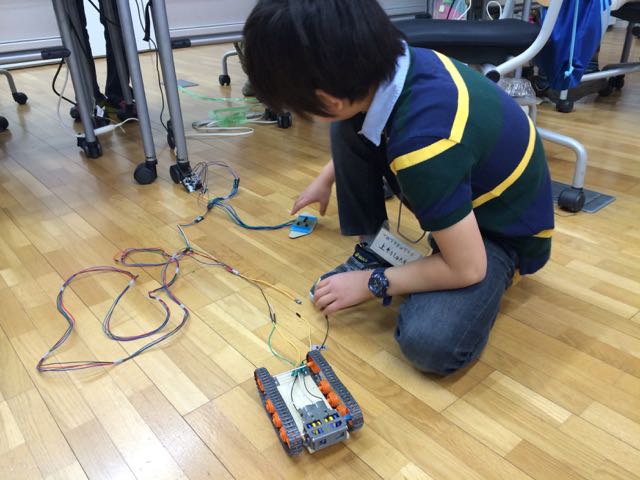
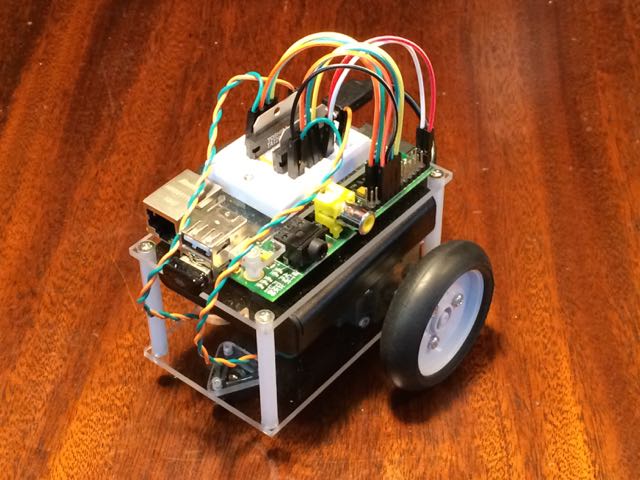
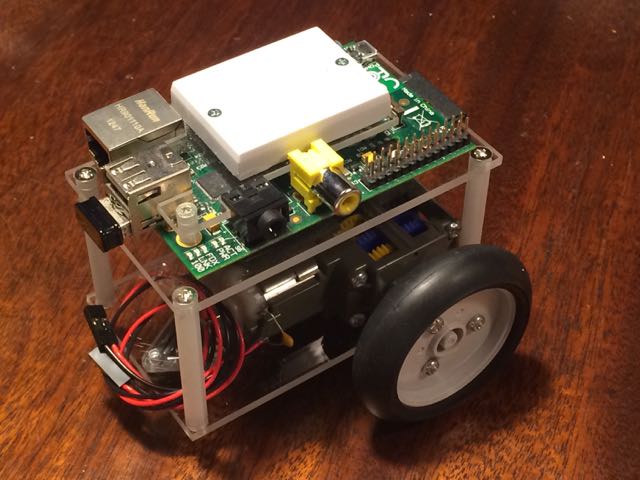
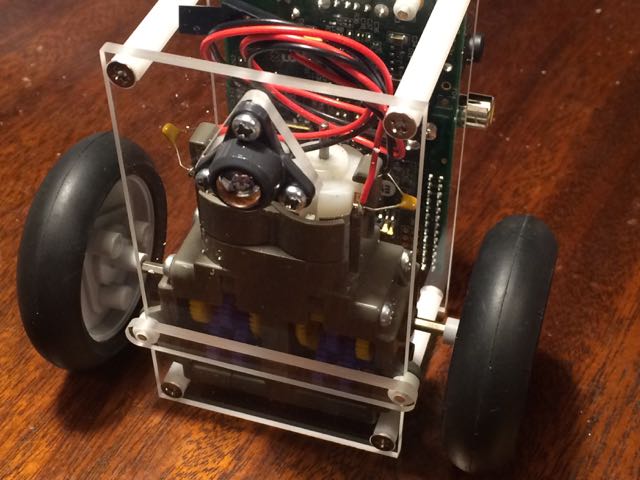
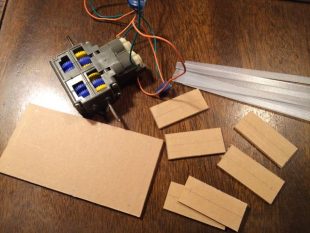
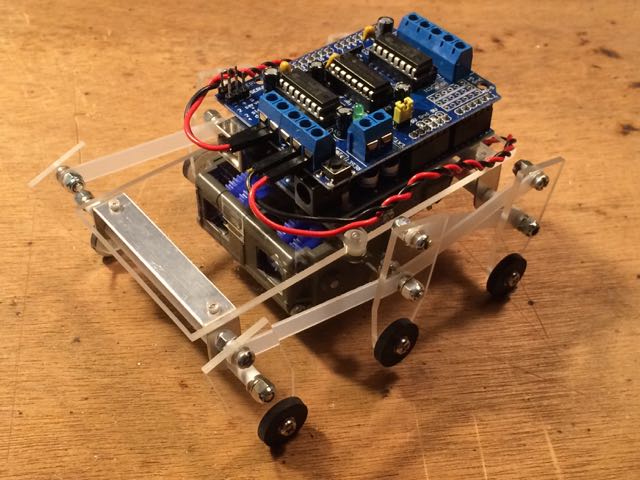
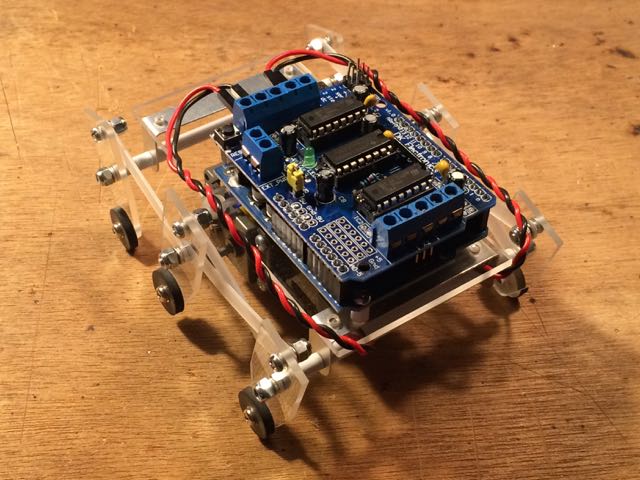
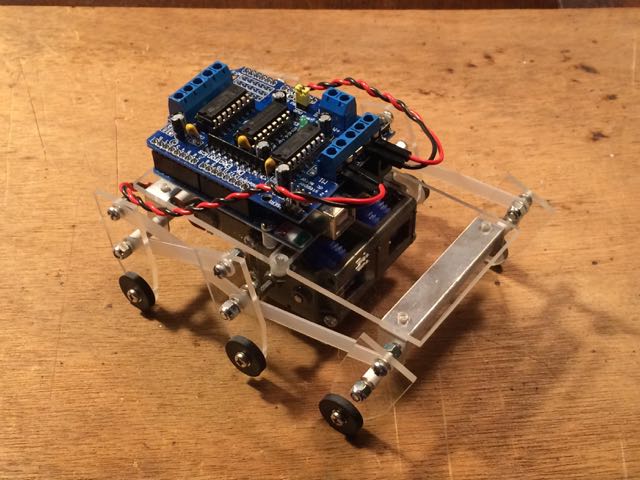
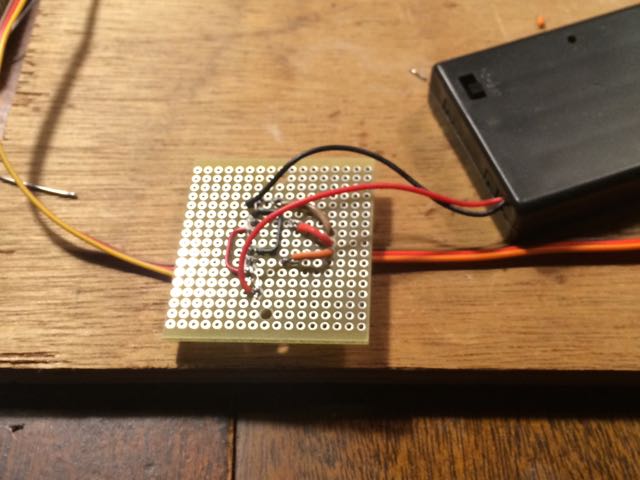
電池ボックス積んで動かしてみた。
前には進むけど、ぎこちないのはやっぱ、脚の動きがおかしいからかな?
これ、三井さんのオリジナルね。シャーシのうねりはほとんどない。リンクの長さはみんな同じっぽいけどなー。何が違うんだろうか?
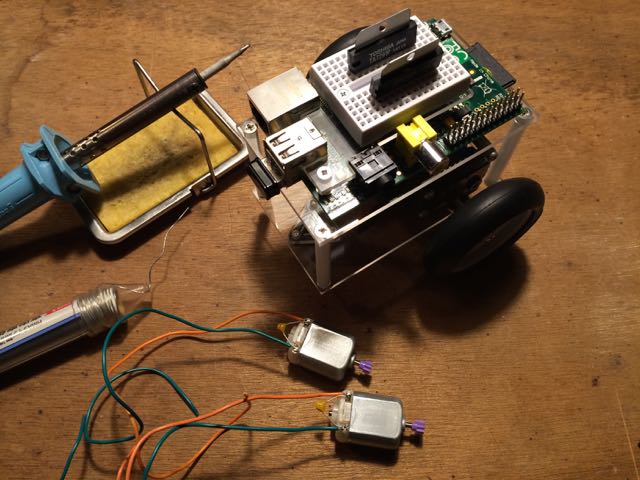
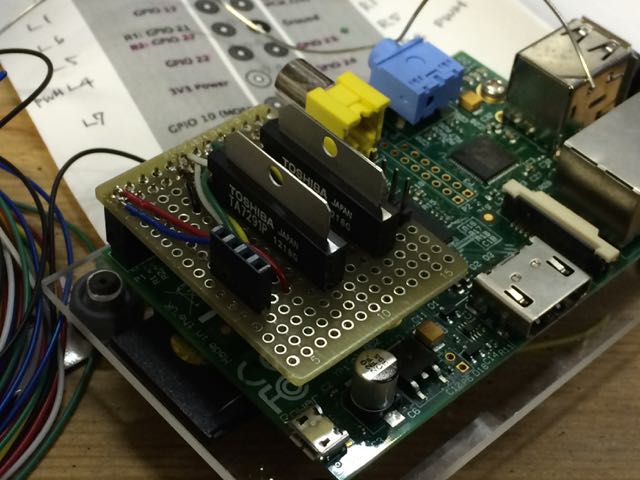
Arduinoの方がいいんじゃね?
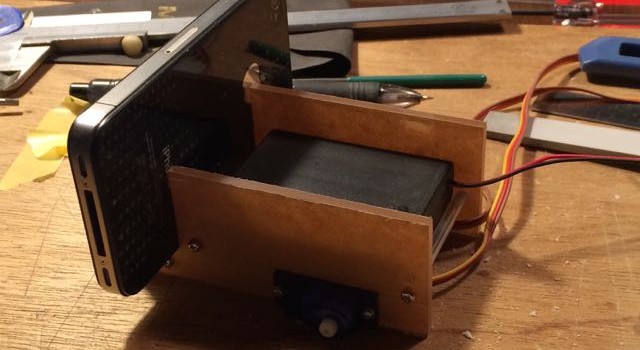
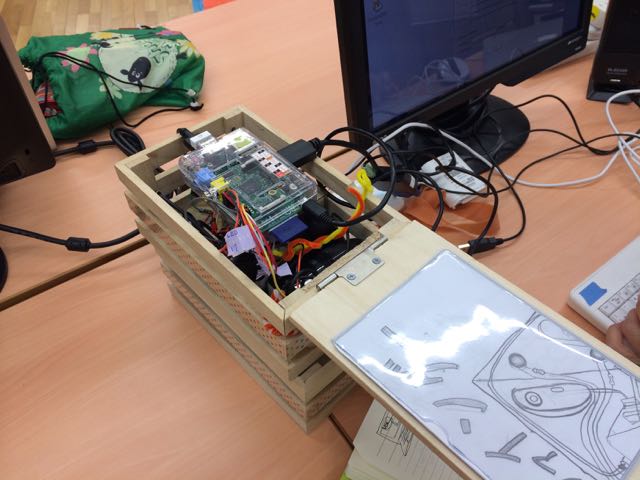
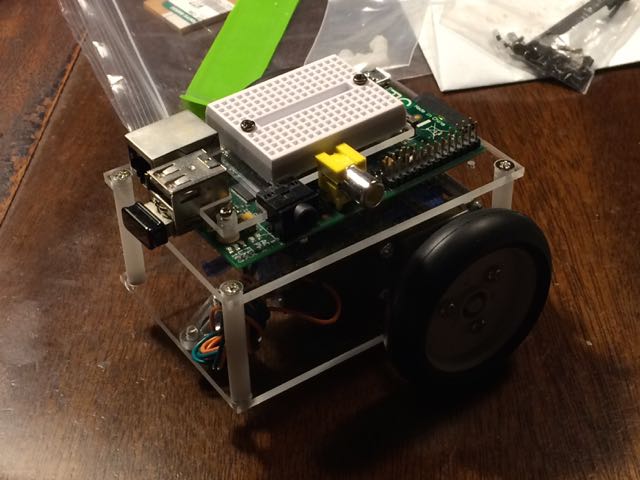
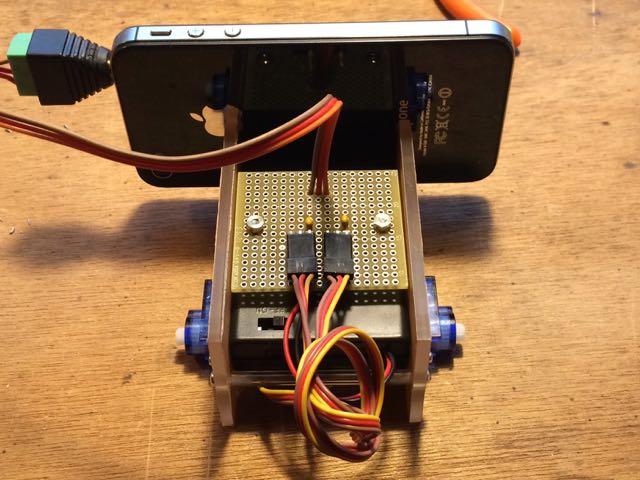
それと、見ての通り、まだRaspberry Pi積んでないんだよね。
あまりよく考えずに進めたからバッテリー載せるスペースがないのよ。
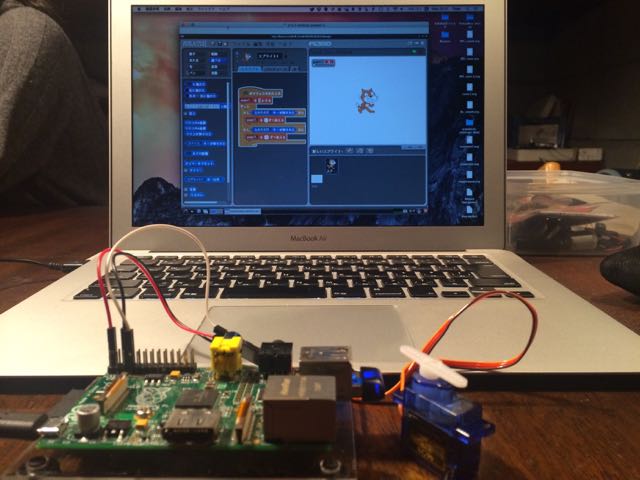
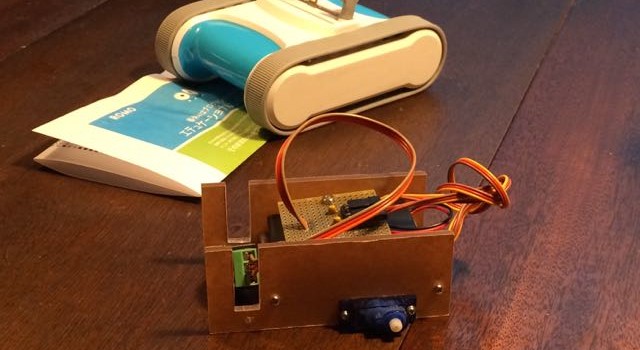
最近、Raspberry PiじゃなくてArduinoの方がいろいろできるんじゃないかと思い始めて…。
いろいろ漁ってたら、こんなものも出てきて、んー、どうしたものか。

![端子台-ステレオミニプラグ変換 [T2P-3.5M3P]](http://www.plaything.jp/wp-content/uploads/2015/04/xxRobot_20150428-01.jpg)