シャーシできた
いろいろごにょごにょとやったけど、やっぱり気にくわないので作り直したわ。
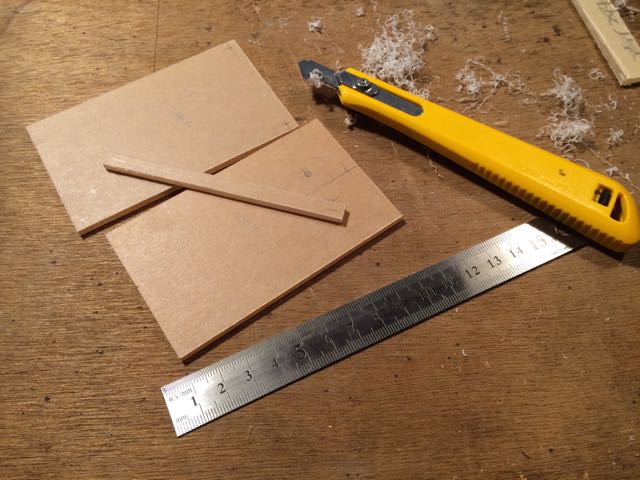
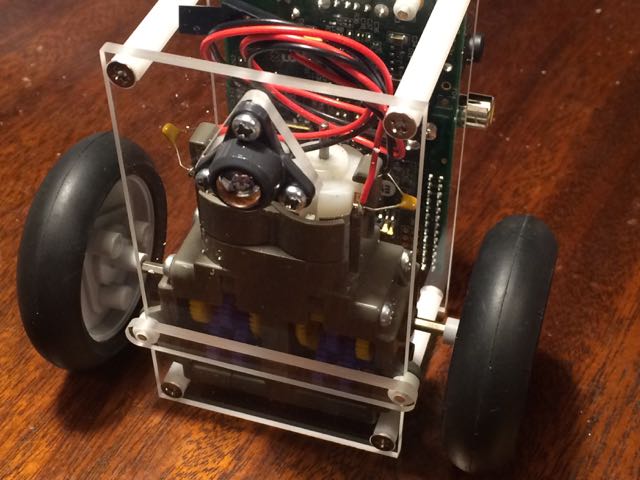
タミヤのダブルギヤボックスに合わせて幅を70mmにしたらなんか野暮ったくて、見れば見るほどなんかなー、という感じだったので10mm詰めた60mmで作り直しだよ。
右が作り直した方で、左が幅の広い方ね。
10mm違うだけでこんなに違う。
あ、スペーサーも長いのが来たから、ここは見た目がちょっと違う。
本当はもうちょっと低いほうがカッコイイんだろうけど、単3の電池ボックス抱えるには45mm必要なんだわ。
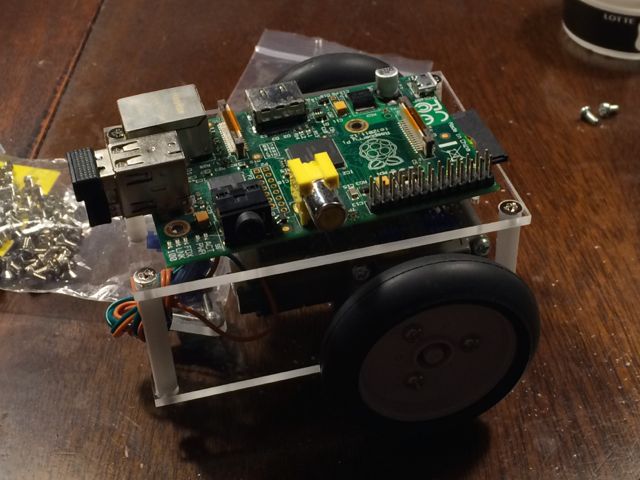
ネジ山盛り
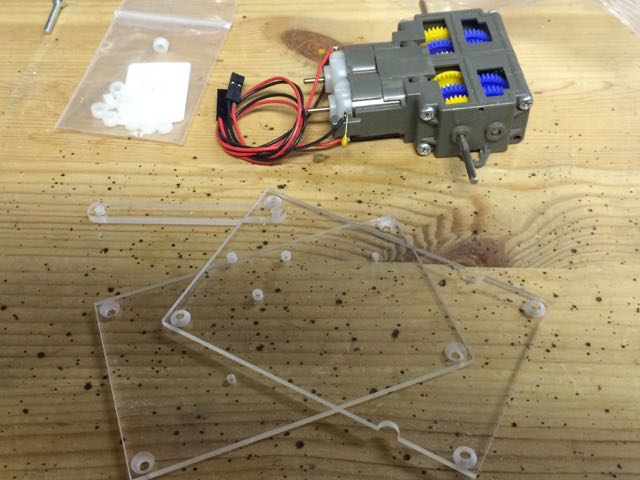
 年末に頼んだネジとかスペーサーとかがやっと届いて一通り必要なものが揃ったよ。
年末に頼んだネジとかスペーサーとかがやっと届いて一通り必要なものが揃ったよ。
正月にはM2とM2.6のタップも入手したし、タップホルダーがないけどピンバイスで代用してとりあえず間に合ったわ。
ネジ切らないで無理やり止めるとか、タッピングビス使うとかあるけど、この位のサイズなら手で回して立てるので十分だわ。
やっぱちゃんとした道具があると違うよね。
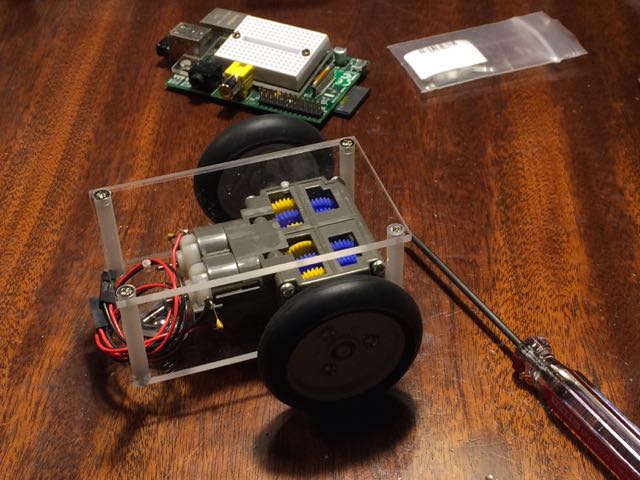
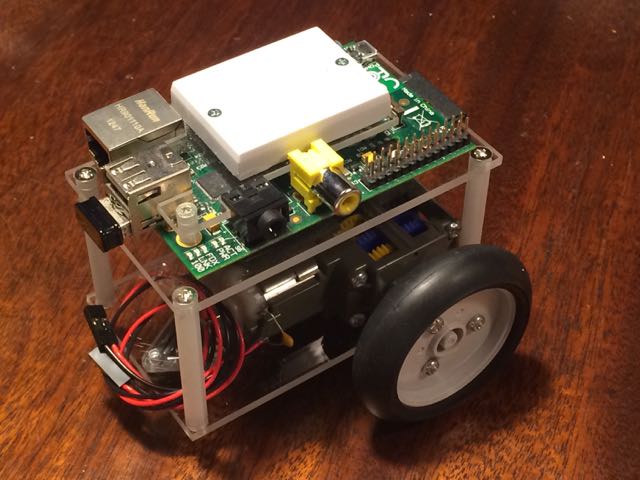
本体はこれで一旦出来上がりってことでいいわ。
ネジ穴の位置とかも微妙にずれちゃってるんだけど、手で開てるからしょうがないよね。組みあがってるので、まぁいいことにしとく。
一番上の画像、白が飛んじゃって箱が載っかってるみたいに見えるけど、これブレッドボードね。
Kogameを見習ってとりあえずはこの上にモータードライバー載せて動かすことにする。
次はTA7291P積んでGPIOとモーター繋げば動くはず。はず、だよね。