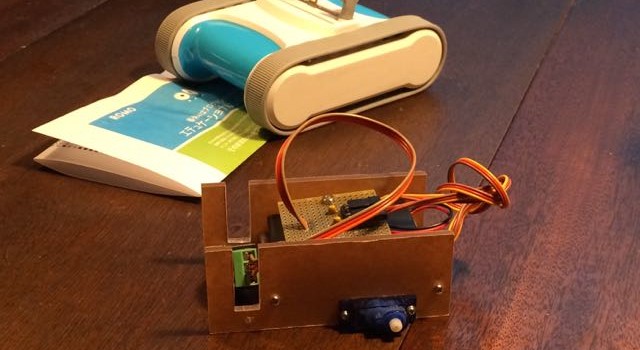
ちょっとだけ前に進んだ。
なんか違うものが写り込んですけど気にするな。
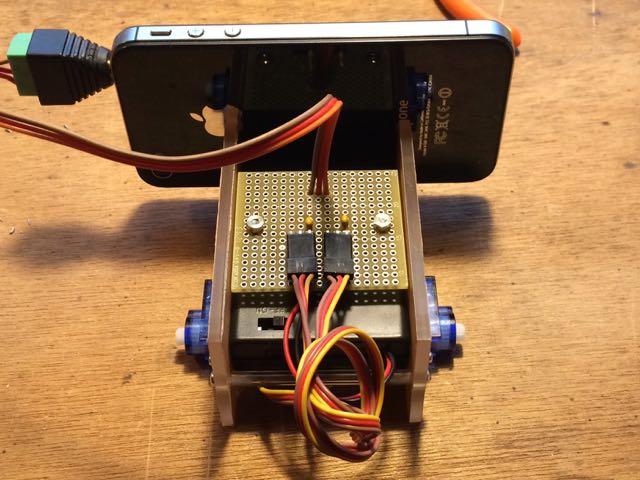
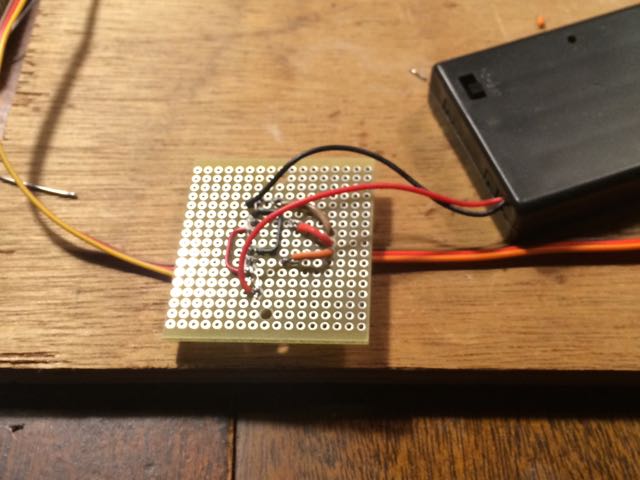
先日ブレットボードに組んだ回路でとりあえず回るところだけ確認できたので、基盤に組み替えた。
この回路の乗った基盤をどうやって固定するかずーと考えていたのだけど、電池ボックスに固定することにしたわ。
サーボモーターはシャーシに固定だし、iPhoneは乗っかてるだけだし、基盤と電源はセットでいいかと。
電源と基盤がセットになってるから、コネクタつけなくて済んだし、寸法的にもなかなかいい感じに収まったんじゃないかと。
ユニバーサル基盤を切る
基盤は電池ボックスに合わせて余分なところを切り落としたわ。
前に、基盤を切るにはどうしたらいいの? って話があったので記しとくわ。
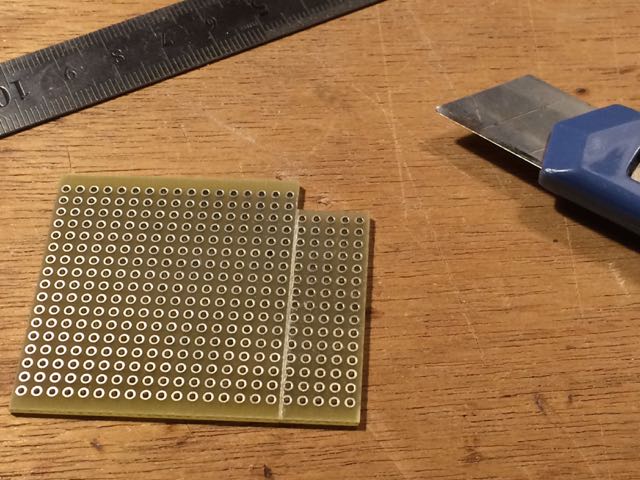 先ずは、普通のカッターで頑張る。
先ずは、普通のカッターで頑張る。
ガラエポ基盤は何気に硬いので頑張っても切り離せないよ。
表を攻めたら、裏からも攻める。
この時に切り込みが裏表でずれないよにね。
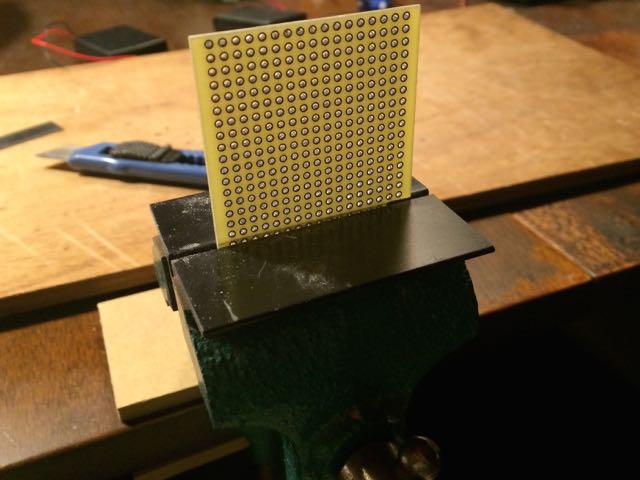 バイスでくわえる。
バイスでくわえる。
バイスがない場合は机の角に当てて気合いを入れる。
アクリル切るみたいに「パキッ」とは折れない。
ミシミシいって「バキッ」と折れる感じ。
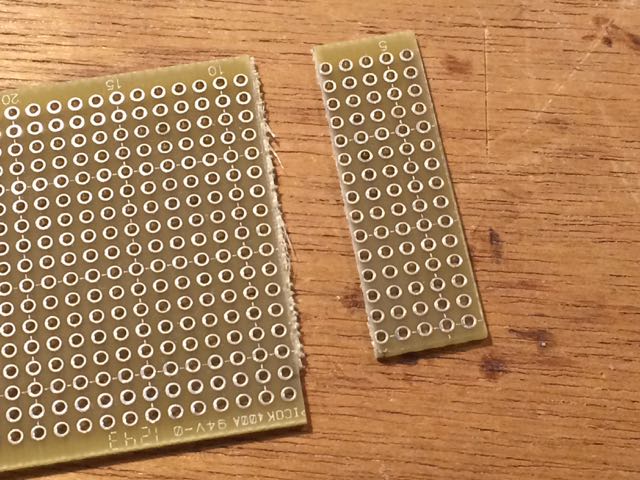 小口をヤスリで整えれば出来上がり。
小口をヤスリで整えれば出来上がり。
部品を半田付け
そんなに複雑な回路ではないけど、出来上がったのをつないでみたら動かないですよっと。
よーく見てみたら電源と信号線間違えてたわ。orz
という訳で、1回バラしてやり直しだよ。
いやいや、さずがに2回は間違えませんよ。
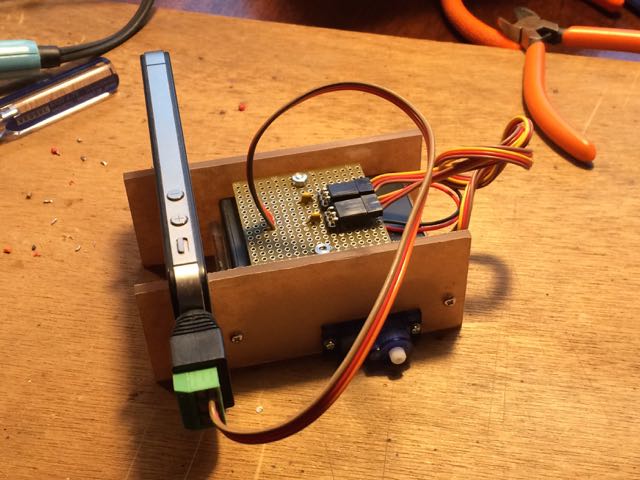
基盤と電池ボックスをネジで固定して、今日の作業は終了。
今度はちゃんと回ったけど、制御不能なのは相変わらず。