
Raspberry Piでいろいろとやってみてるんだけどね、やっぱりロボットでしょ。
ScratchGPIOでモーターをコントロールできればMINDSTORMS並みに遊べるんじゃね、と思った訳。
で、コードがかけなくても電子回路とか知らなくても、とりあえず動くところまで漕ぎ着けたので記しておくわ。
ズブの素人でもロボットが作れる
 Raspberry PiにはGPIO(General Purpose Input/Output)っていう外部の電子回路と通信できるとげとげがある訳さ。
Raspberry PiにはGPIO(General Purpose Input/Output)っていう外部の電子回路と通信できるとげとげがある訳さ。
1番から26番まであって、それぞれに役割があるんだけど、どうれがどう、っていう話は飛ばすので知りたい人は下記をみてね。
この画の一番左の手前が1番ピンね。その上が2番で、左から2番目の手前が3番…で一番右の奥側が26番な。
で、このとげとげとモーターを繋いでごにょごにょするんだ。
モーターを繋ぐ方法はあとで書く。
GPIOをコントロールする方法
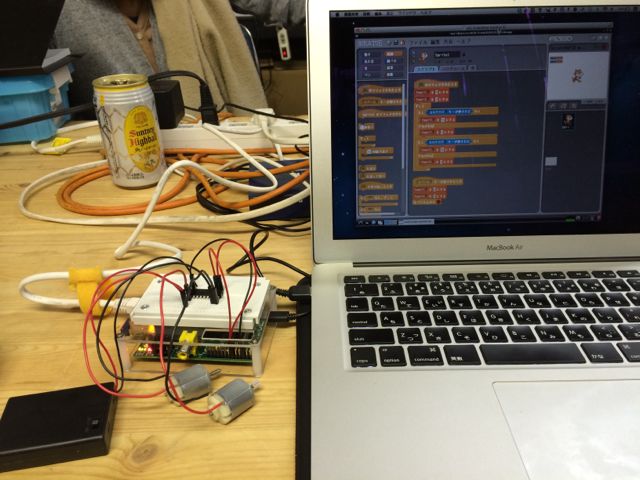 次にGPIOをコントロールする方法だけど、こじ研みたいなオマジナイは使えないので、そういう人のためにScratchGPIOっていう素敵なものがある訳よ。
次にGPIOをコントロールする方法だけど、こじ研みたいなオマジナイは使えないので、そういう人のためにScratchGPIOっていう素敵なものがある訳よ。
「素敵」とはいえ、これもそれなりにハードルが高いから覚悟しろよ。
まず、ScratchGPIOのインストールとLチカのチュートリアル、モーターの動かし方は下記にある。
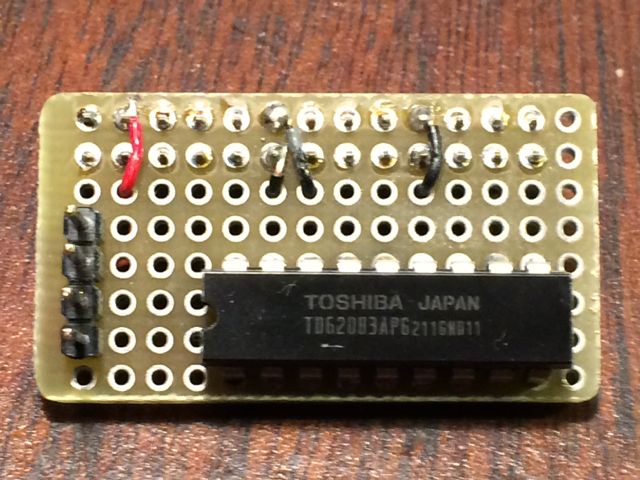
ここで使ってる「ULN2003」っていうトランジスタアレイは秋葉原中探したけど何処にも売ってなかったけど、東芝の「TD62083」というのが代替えで使えるらしいのでこっちを買ってきた。
一旦ブレッドボードに組んでみて、モーターが廻ることを確認してから、ユニバーサル基盤に半田付けする。
モジュールを作る
 ブレッドボード上で動くところまで確認できたら、あとは間違わずに半田付けすればいいのよ。と、簡単に書いてるけど細かい作業は最近特に面倒だわ。目見えんのよ、まぢで。
ブレッドボード上で動くところまで確認できたら、あとは間違わずに半田付けすればいいのよ。と、簡単に書いてるけど細かい作業は最近特に面倒だわ。目見えんのよ、まぢで。
上記のサイトでは外部電源を繋いでたんだけど、GPIOの情報をいろいろ漁ってたら2番ピンと3番ピンから5V出てんじゃん、ってことでそのように配線。
本当は通電の確認用にLEDも付けようとしたんだけど、GPIOに差したら隣のビデオとおもいっきし干渉することが解ったので、その部分は急遽切り落とした。
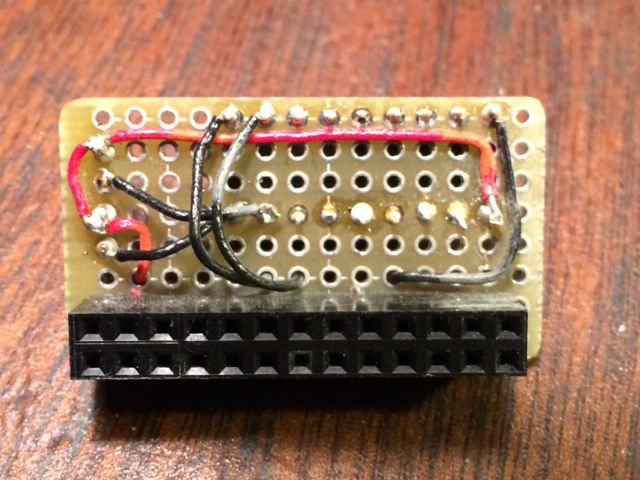 裏側はこんな感じね。
裏側はこんな感じね。
ここまでくればもう、あと1歩だぞ。
シャーシに載せる
 シャーシは前に作ってあったものをとりあえず使うけど、そのうちアクリルで作り直す予定。
シャーシは前に作ってあったものをとりあえず使うけど、そのうちアクリルで作り直す予定。
汎用のきくパーツがいいので、ギヤボックスとホイールはタミヤのな。
ユニバーサルプレートはアッパーはタミヤのだけど、ロワーは実はタミヤじゃなくてミュウロボ用なんだ。
スタジオミュウのユニバーサルプレート(スタジオミュウではタッピングプレート)はタミヤのとぱっと見は同じなんだけど、穴の径が微妙に小さくて3mのタッピングビスが使えるんだよね。タミヤのは丁度3mなのでM3のナットが必要な訳。なので使い分けてるのね。
穴のピッチとRaspberry Piの固定用の穴がちょうどいい感じに収まるのでスペーサーかませれば難なくきれいに固定できる。
ピロボールもミュウロボのプレートに付属してるヤツね。
とりあえず、ハードはこれでよしと。
続きはまた今度書くわ。