大人の底力を発揮すべし
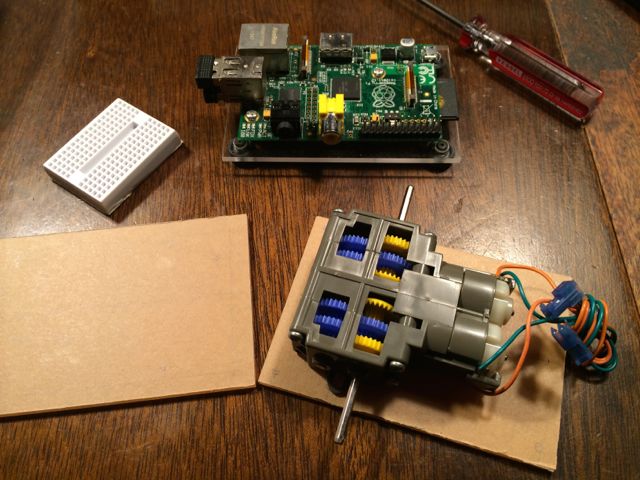
Raspberry Piで動かすロボット、作ってみるね。
と云うか、過去にもトライしてるんだけど、まともに動いてない。orz だからこれは2号機ね。
ここ最近の、諸々の活動を通して、これはやっぱり俺がやらないといけない、大人の底力を発揮すべし。という結論に達した訳だ。
カレーより、プライオリティ高いかもしれん。
で、何がしたいかと云うと、
- Raspberry Piで動かす
- Arduinoもありかも?
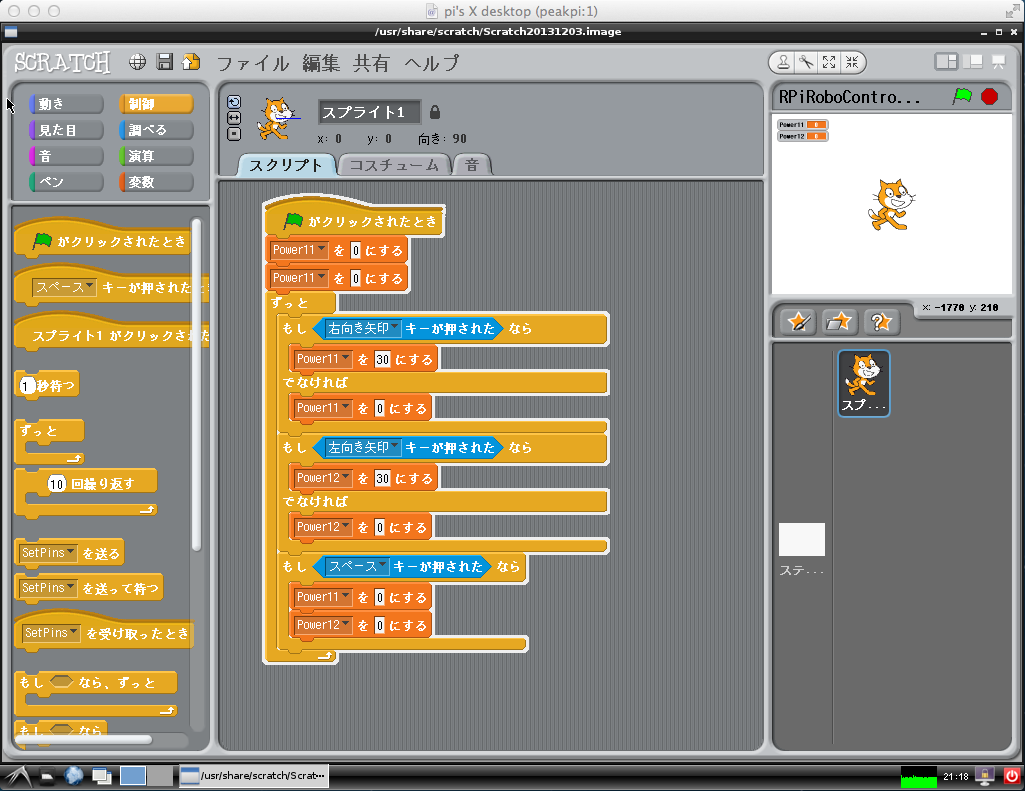
- Scratchで動かす
- 汎用性のあるパーツを使う
- 誰でも組み立てられる
- なるべく安価に
- 無線で
- センサー類は別途後付け
このくらいにしておくか。
ということで、とりあえずシャーシを作ってみた。
その前に、これまでの振り返り。
これまでにやったこと
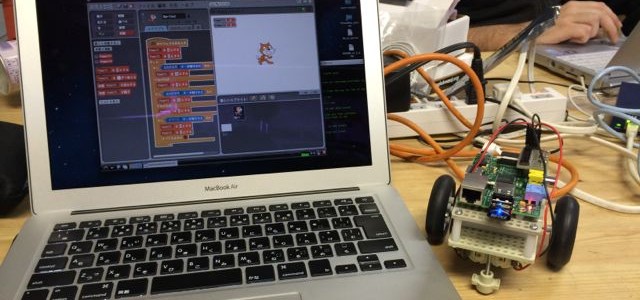
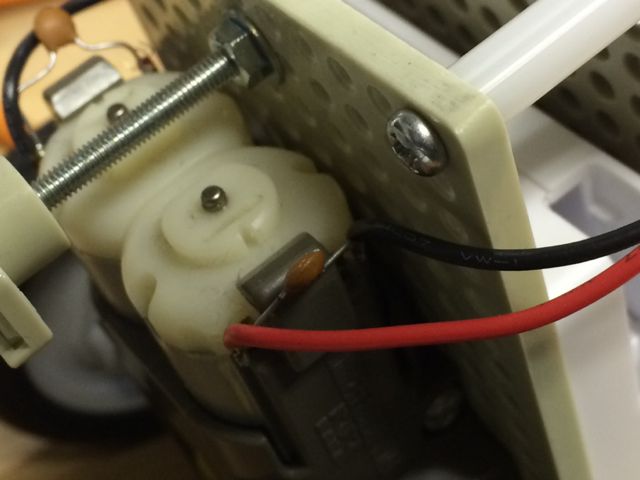
 これはかれこれ2年半前だな。なのぼ積んでScratchから動かしてる動画が残ってた。
これはかれこれ2年半前だな。なのぼ積んでScratchから動かしてる動画が残ってた。
その後に、同じシャーシになのぼをRPiに載せ変えて動かそうとしたんだけど、上手く動かなくてモータードライバー積まないとダメだってことになってる。
まずはシャーシから
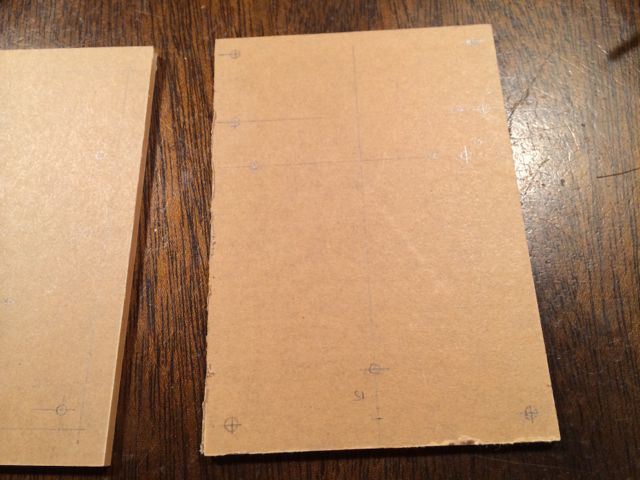
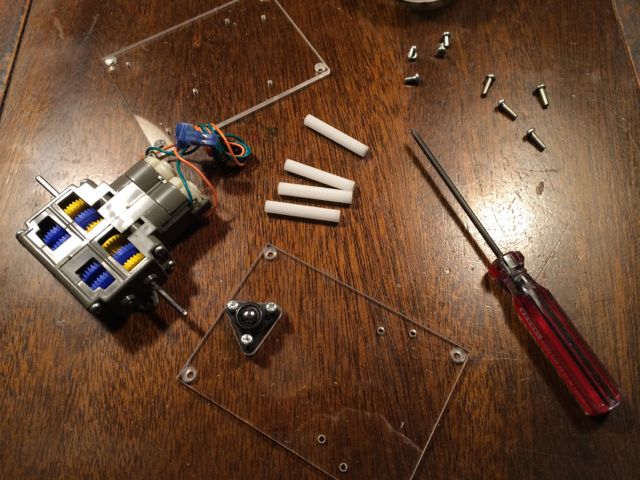
まず、手始めにシャーシの作り直しな。今回はちゃんとアクリルで作るよ。
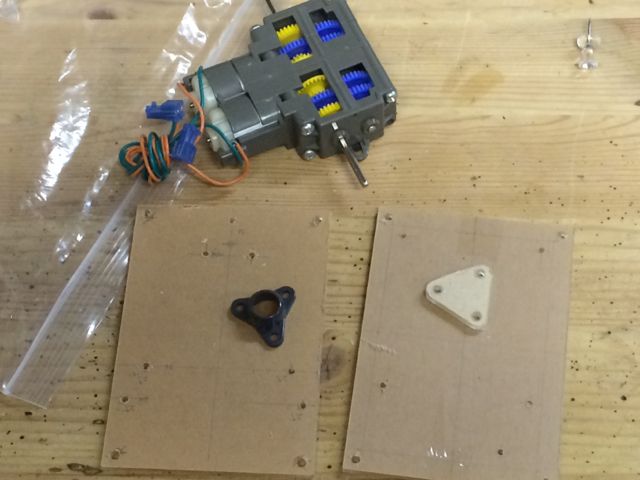
とりあえず寸法だして、切って、穴開けて、組み立てた。
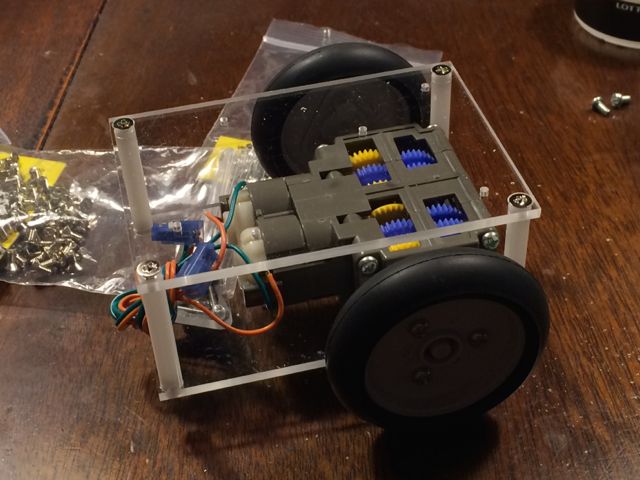
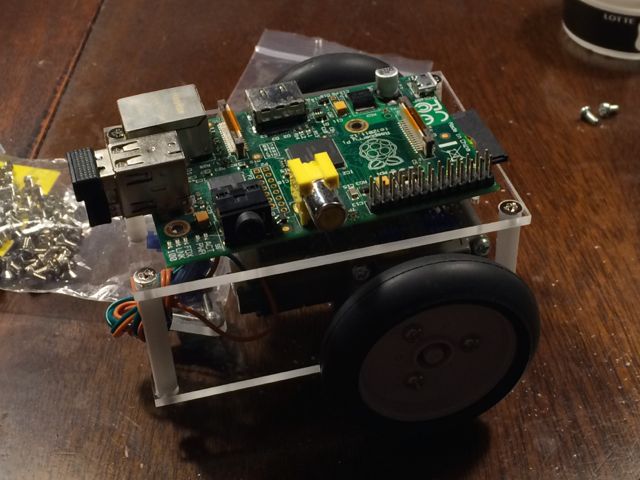
あぁ、なんかバランス悪くてかっこ悪いわ。
なるべくコンパクトにしたいんだけど、長さの割に幅が広いからだな。
タミヤのギヤボックス2種類あって、取り付け幅が違うんだよね。どっちも乗っけられる様に幅の広い方にあわせてシャーシの幅を70mmにして、Raspberry Pi載せた時に前後左右のマージンを同じ様に取ったら全長100mm位でいいかと思たんだけど、これもう20mm位延ばさないとかっこ悪いね。ユニバーサルプレートと10mmしか幅変わらないのに、チキショー。
一応、Raspberry PiもBとB+どっちも行ける様に穴開けといたぜ。
ついでにいうと、RSコンポーネンツでA+が換える様になったので、速攻オーダーしたわ。ただし、穴開け直しだわ。
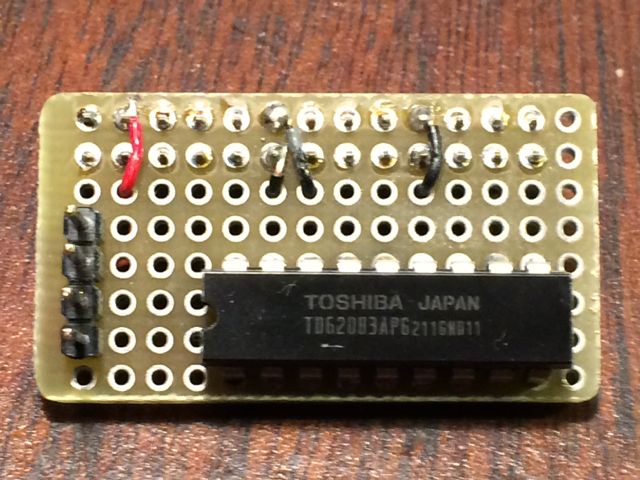
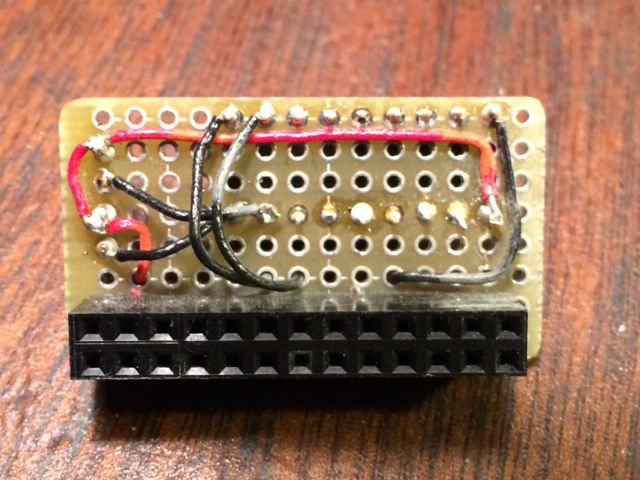
まぁ、ちょっとかっこ悪いけど、これはこれでよしとして、次はRaspberry Piにモータードライバー載せるところ作るわ。